
جلسه دوازدهم : راه اندازی سنسور مادون قرمز
به نام خدا
جلسه دوازدهم : راه اندازی سنسور مادون قرمز
در این جلسه میخواهیم مدار راه انداز سنسور مادون قرمز را ببندیم و خروجی آن را به آی سی آپ امپ بدهیم و یک خروجی دیجیتال مناسب برای پردازنده از آپ امپ دریافت کنیم .
قطعات مورد نیاز پروژه :
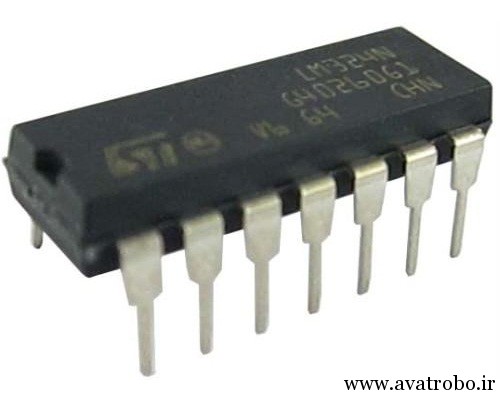
- آی سی LM324
- فرستنده و گیرنده مادون قرمز 3 میلی متر
- مقاومت 10 کیلو اهم
- مقاومت 270 اهم
- مقاومت 330 اهم
- مولتی ترن 10 کیلو اهم ( مقاومت متغیر )
- رگولاتور 7805


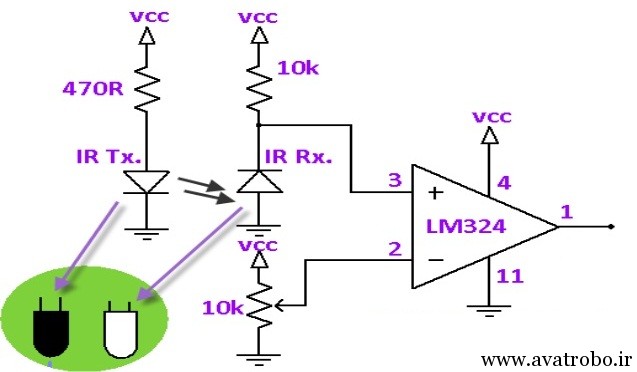
همانطور که میبینید مدار فرستنده و گیرنده مادون قرمز به صورت زیر است .
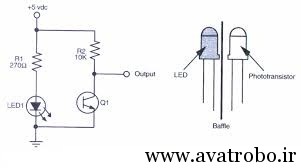
پایه مثبت فرستنده ( پایه بلندتر ) با یک مقاومت 270 اهم به 5 ولت خروجی رگولاتور وصل میشود و پایه منفی آن مستقیما به زمین وصل میشود . گیرنده نیز پایه منفی آن ( پایه بلندتر – برعکس فرستنده ) به زمین و پایه مثبت آن با یک مقاومت 10 کیلو به 5 ولت وصل میشود . خروجی ولتاژ گیرنده را گرفته و به ورودی مثبت آپ امپ وصل میکنیم . توجه داشته باشید که خروجی ولتاژ در این جا آنالوگ خواهد بود ، خروجی دیجیتال را در پایه خروجی آپ امپ خواهیم داشت . بعد از اینکه مدار را بستیم برای اینکه بفهمیم فرستنده سنسور مادون قرمز درست کار میکند و روشن است میتوانیم با دوربین گوشی خود به سنسور نگاه کنیم تا ببینیم روشن است یا نه !!! نور مادون قرمز با چشم دیده نمیشود اما با دوربین گوشی مشخص میشود .
پایه های آی سی آپ امپ LM324 به صورت زیر است :
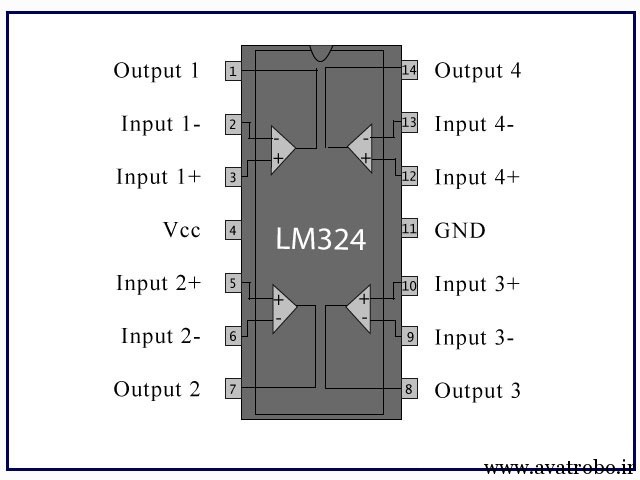
همان طور که در شکل بالا میبینید آی سی LM324 از چهار آپ امپ تشکیل شده که هر آپ امپ برای یک سنسور استفاده میشود . پایه های 3 و 5 و 10 و 12 به خروجی سنسور های ما وصل میشوند . پایه های 2 و 6 و 9 و 13 برای هر سنسور به مولتی ترن ( مقاومت متغیر ) وصل میشود . پایه های 1 و 7 و 8 و 14 خروجی های آپ امپ هستند که صفر و یک میشوند و به میکروکنترلر ربات وصل میشوند تا وضعیت خط مسیر مشخص شود . پایه 4 به 5 ولت مدار و پایه 11 به زمین مدار وصل میشوند .
همانطور که در جلسه های قبل گفته شد ، عملکرد آپ امپ به این صورت است که خروجی سنسور به ورودی مثبت آپ امپ وصل میشود ، اگر ولتاژ این ورودی مثبت از ولتاژ ورودی منفی ( همان پایه هایی که به مولتی ترن وصل میشوند ) بیشتر باشد در نتیجه خروجی ما که به میکروکنترلر خواهد رفت یک منطقی ( High ) میشود و اگر کمتر بود صفر منطقی ( Low ) میشود . ولتاژ ورودی منفی را میتوان با چرخاندن پیچ روی مولتی ترن تغییر داد ، این ولتاژ باید به گونه ای تنظیم شود تا سطح سیاه و سفید به راحتی از هم تشخیص داده شوند .
مدار اتصال سنسور ها به آی سی LM324 به صورت زیر است :
بعد از بستن مدار بالا باید پایه شماره یک را که خروجی آپ امپ اولی در آی سی LM324 است به میکروکنترلر وصل کرد . این پایه فقط صفر و یک میشود و میکروکنترلر از وضعیت آن رنگ سیاه یا سفید زمین را تشخیص میدهد .
ما این پایه را توسط یک مقاومت ، به ال ای دی وصل کردیم تا بتوانیم وضعیت خروجی آپ امپ را ببینیم .
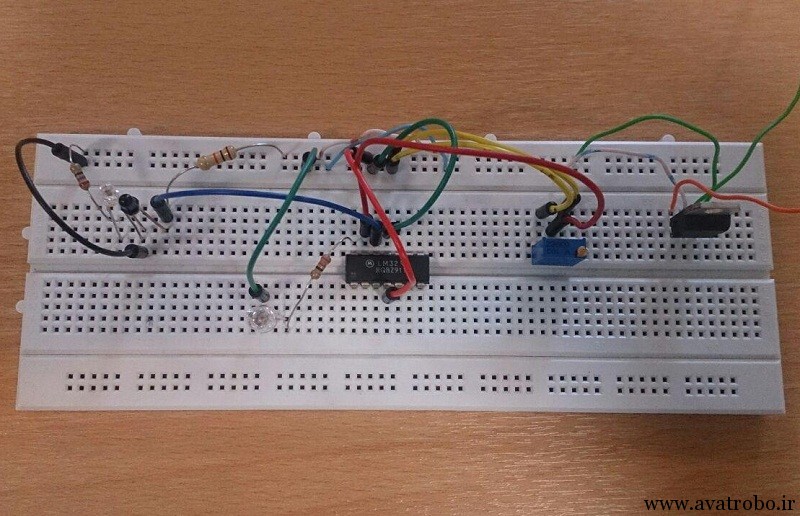
تصویر مداری که ما بسته ایم به صورت زیر است :

فیلم این مدار را میتوانید در زیر ببینید :
پایان جلسه دوازدهم . تا جلسه بعد خدانگهدار
پست های مرتبط




آبان 3, 1396

دیدگاهتان را بنویسید