
کنترل PID با آردوینو و دو موتور براشلس
کنترل PID با آردوینو و دو موتور براشلس
کنترل کننده PID مخفف کلمه های Proportional ، Integral و Derivative ( نسبتی ، انتگرالی و مشتقی ) یک نوع مکانیزم فیدبک حلقه کنترل رایج در سیستم های صنعتی است . یک کنترل کننده PID مقدار خطا را بین نقطه مطلوب و نقطه اندازه گیری شده را محاسبه می کند و یک عملیات اصلاح را بر پایه قسمت های P ، I و D که از نامشان مشخص است انجام می دهد .
امروز در این پروژه از این کنترل کننده برای کنترل کردن دو موتور براشلس استفاده می کنیم . با توسعه این سیستم می توان سیستم ربات های پرنده عمود پرواز را طراحی کرد . تعادل این موتور ها را و محاسبه زاویه توسط سنسور MPU6050 انجام می شود . خطا در واقع تفاوت بین مقدار واقعی و مقدار مطلوب است . نقطه مطلوب در واقع جایی است که سیستم کاملا در حالت افقی باشد .
بخش اول :
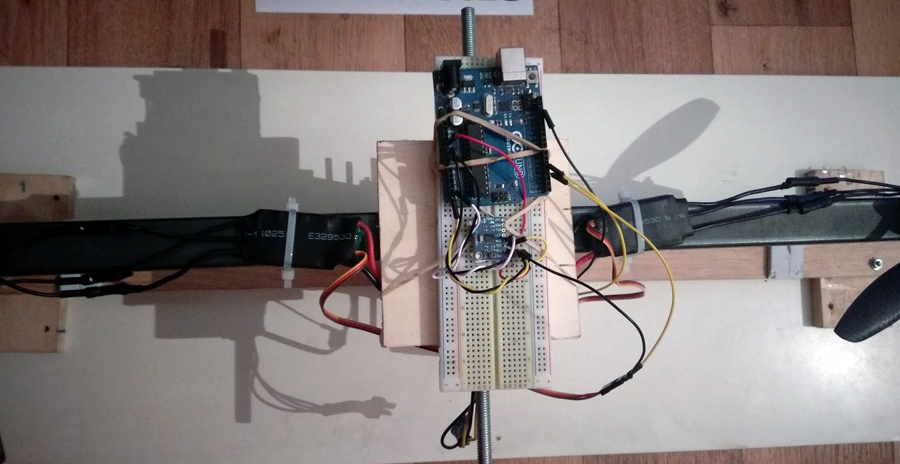
سیستم ما به صورت یک الاکلنگ عمل می کند و در واقع یک کوادکوپتر را در یک محور نشان می دهد . با این که هر دو طرف الاکلنگ ساختار یکسانی دارند و از موتور ها و ملخ های یکسان استفاده شده است ولی تراست ( نیوری بالابرنده ) آن ها برای یک سیگنال PWM یکسان متفاوت است ، دلیل این تفاوت این است که موتور ها و ملخ هایی که تولید می شوند ایده آل نیستند و با یکدیگر تفاوت های بسیار جزئی دارند . بنابراین نمی توانیم با یک سیگنال PWM یکسان آن ها را در حالت تعادل نگه داریم و باید از وضعیت سیستم توسط سنسور MPU6050 مشخص شده و میزان خطا به دست آید( فیدبک گرفته شود ) و این سیگنال ها به نحوی اصلاح شوند .
همان طور که در شکل زیر می بینید قطعات مورد نیاز برای این پروژه مشخص هستند .

قطعات الکترونیکی مورد نیاز :
برد آردوینو UNO
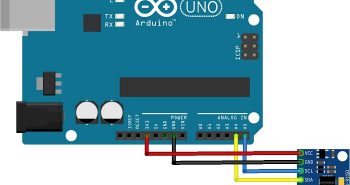
سنسور MPU6050 ( ماژول GY-521 )
دو عدد اسپیدکنترل 20 آمپر
دو عدد موتور براشلس به عنوان مثال مدل A2212
بردبورد
مقداری سیم بردبوردی

شما در این پروژه با راه اندازی موتور های براشلس ، سنسور شتاب سنج و جایروسکوپ MPU6050 ، تنظیم ضرایب PID ، نحوه کار با داده های شتاب سنج و جایروسکوپ ، از بین بردن نویز و فیلتر کردن داده ها و فیلتر کامپلمنتری آشنا می شوید .
شماتیک مدار ، کد های پروژه و فایل PDF راهنما در فایل دانلودی قرار دارد .
[maxbutton id=”279″ url=”http://avatrobo.ir/product/%da%a9%d9%86%d8%aa%d8%b1%d9%84-pid-%d8%a8%d8%a7-%d8%a2%d8%b1%d8%af%d9%88%db%8c%d9%86%d9%88-%d9%88-%d8%af%d9%88-%d9%85%d9%88%d8%aa%d9%88%d8%b1-%d8%a8%d8%b1%d8%a7%d8%b4%d9%84%d8%b3/” text=”دانلود پروژه” ]
پست های مرتبط
خرداد 6, 1397
اردیبهشت 18, 1397
دی 4, 1396


دیدگاهتان را بنویسید