
آموزش پروژه محور آردوینو – جلسه چهاردهم سروو موتور
به نام خدا
آموزش پروژه محور آردوینو – جلسه چهاردهم سروو موتور
در این جلسه می خواهیم یک سروو موتور را با استفاده از آردوینو کنترل کنیم .
ابتدا یک برنامه برای حرکت رفت و برگشتی سروو می نویسیم و سپس یک پتانسیومتر به مدار خود اضافه می کنیم و موقعیت سروو را با پتانسیومتر کنترل می کنیم .
قطعات مورد نیاز پروژه :
– سروو موتور

– پتانسیومتر 10 کیلو اهمی

– بردبورد
– برد آردوینو UNO

– تعدادی سیم
– خازن 100 میکرو فاراد
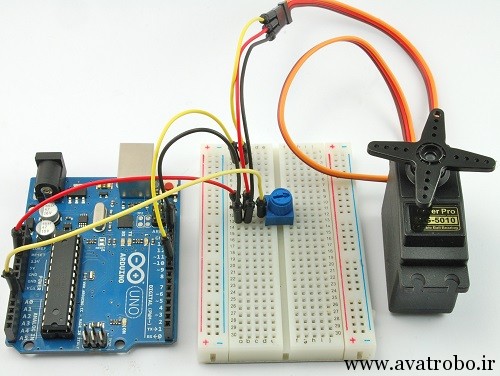
شماتیک مدار رفت و برگشتی سروو :
شماتیک مدار به صورتی است که فقط سروو موتور به آردوینو متصل می شود .
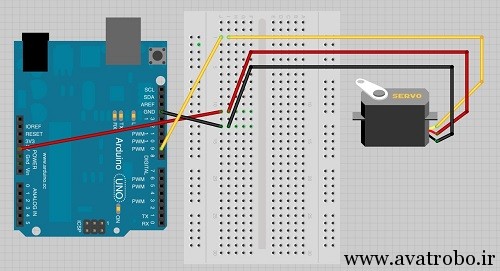
سروو موتور سه پایه دارد که عموما به این سه پایه سه سیم به رنگ های قهوه ای ، قرمز و نارنجی وصل می شوند . سیم قهوه ای باید به زمین وصل شود ، سیم قرمز به 5 ولت و سیم نارنجی به سیگنال PWM وصل شود . سیم نارنجی را به پین شماره 9 آردوینو وصل کرده ایم .
اگر سروو موتور به خوبی کار نکرد و شما شاید ببینید موقعی این اتفاق می افتد که برد آردوینو به پورت USB متصل شده است . زیرا سروو موتور توان زیادی می کشد خصوصا موقع حرکت اول . این کشیدن توان باعث کاهش ناگهانی ولتاژ می شود ، این بالا و پایین شدن ولتاژ باعث عملکرد نامناسب سروو موتور می شود .
این مشکل با گذاشتن یک خازن در حد چند صد میکروفاراد بین زمین و 5 ولت حل می شود .
خازن به عنوان یک مخزن الکتریکی برای سروو موتور عمل می کند به طوری که از برد آردوینو شارژ می شود و در مواقع کمبود توان برای سروو ، توان خود را به سروو می دهد . سر منفی خازن معمولا به علامت منفی مشخص می شود .
کد های آردوینو برای عملکرد رفت و برگشتی آردوینو :
برنامه را بر روی برد آردوینو آپلود کنید . با آپلود کردن این برنامه بر روی برد آردوینو و روشن کردن برد ، سروو موتور به صورت رفت و برگشتی به چپ و راست حرکت خواهد کرد .
برای دانلود برنامه بر روی لینک زیر کلیک کنید .
[maxbutton id=”11″ url=”http://avatrobo.ir/wp-content/uploads/2015/11/Sweep-servo.zip” text=”دانلود فایل” ]
در خط زیر کتابخانه servo را اضافه کرده ایم . این کتابخانه این امکان را به می دهد که بتوانیم به سروو موتور زاویه بدهیم یعنی عددی که در آردوینو وارد می کنیم همان زاویه سروو موتور است .
#include <Servo.h>
خط زیر برای تعریف سروو است .
Servo servo;
اگر بخواهیم سروو بیشتری را تعریف کنیم می توانیم به صورت خطوط زیر عمل کنیم .
Servo servo1;
Servo servo2;
در تابع setup باید شماره پین را که سروو موتور به آن وصل است مشخص کنیم .
servo.attach(servoPin);
توسط خط زیر می توانیم به سروو موتور زاویه بدهیم .
servo.write(angle);
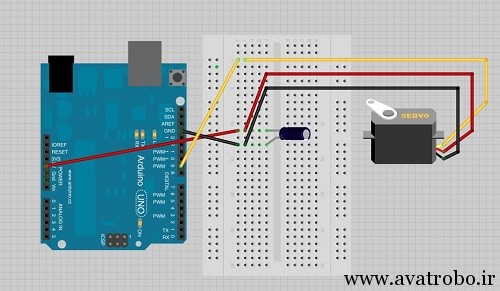
شماتیک مدار سروو با پتانسیومر :
با این مدار می توانیم به کمک چرخش پتانسیومتر ، زاویه سروو را کنترل کنیم .
پایه وسط پتانسیومتر را باید به پین A0 آردوینو وصل کنیم .
کد های آردوینو برای کنترل زاویه با پتانسیومتر :
کد های برنامه آردوینو را از لینک زیر دانلود کنید .
[maxbutton id=”12″ url=”http://avatrobo.ir/wp-content/uploads/2015/11/Knob-servo.zip” text=”دانلود فایل” ]
همان طور که در برنامه بالا دیدید ، عددی را که از مبدل آنالوگ به دیجیتال دریافت می کنیم عددی بین 0 تا 1023 است که بر عدد 6 تقسیم می کنیم تا تقریبا نزدیک به 180 شود . 1023 بر 6 تقسیم شود برابر 170.5 می شود این یعنی ما سروو را با چرخش پتانسیومتر از 0 تا 170 تغییر می دهیم .
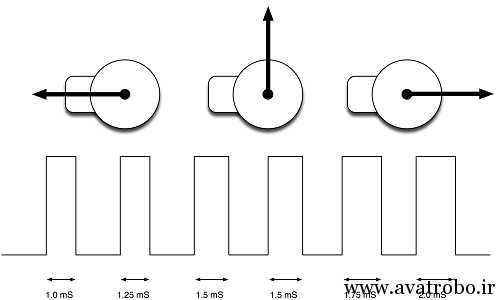
سروو موتور ها :
موقعیت موتور سروو با پهنای پالس تنظیم می شود . سروو موتور تقریبا هر 20 میلی ثانیه یک پالس نیاز دارد . اگر پهنای پالس ارسالی یک میلی ثانیه باشد سروو در موقعیت صفر درجه قرار می گیرد و اگر پهنای پالس 1.5 میلی ثانیه باشد در مرکز یعنی در 90 درجه قرار می گیرد و اگر پهنای پالس 2 میلی ثانیه باشد سروو در وضعیت 180 درجه قرار دارد .
پایان جلسه چهاردهم
پست های مرتبط

اردیبهشت 9, 1398

اسفند 5, 1397



بهمن 2, 1397


دیدگاهتان را بنویسید