
مبانی ارتباطی پروتکل UART
به نام خدا
مبانی ارتباطی پروتکل UART

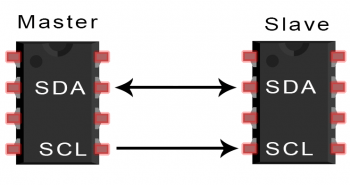
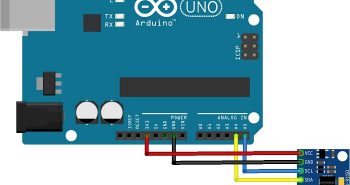
در ارتباط UART دو دستگاه به طور مستقیم به یکدیگر متصل می شوند. دستگاه ارسال کننده داده های موازی را که از یک بخش کنترلی مانند CPU دریافت می کند، به صورت سریال تبدیل کرده و برای دستگاه دریافت کننده ارسال می کند. سپس در سمت دریافت کننده داده های سریال به صورت موازی تبدیل می شوند. داده ها از پین TX دستگاه ارسال کننده برای پین RX دستگاه دریافت کننده فرستاده می شوند.

UART داده ها را به صورت ناهمزمان ارسال می کند. به این معنی که سیگنال کلاک برای همزمان کردن داده های خروجی دستگاه ارسال کننده با داده های نمونه دستگاه دریافت کننده، وجود ندارد. به جای سیگنال کلاک از بیت های شروع، توازن(parity) و پایان در بسته داده های ارسالی استفاده می کند، لذا دستگاه دریافت کننده متوجه می شود که چه زمانی شروع به خواندن داده ها کند. در زیر اطلاعاتی در مورد این پروتکل مشاهده می کنید

نحوه ی کار کرد :
دستگاه ارسال کننده UART داده ها را از گذرگاه داده(data bus) دریافت می کند. گذرگاه داده برای ارسال داده ها به UART توسط قطعاتی مانند CPU، حافظه و یا میکروکنترلر استفاده می شود. داده ها به صورت موازی از گذرگاه داده به UART فرستاده شده، دستگاه ارسال کننده با اضافه کردن بیت های شروع، توازن و پایان یک بسته داده ایجاد می کند. در ادامه این بسته به صورت سریال و بیت به بیت از طریق پین TX ارسال می شود. دستگاه دریافت کننده داده های سریال را از طریق پین RX دریافت و به حالت موازی تبدیل کرده و بیت های شروع، تعادل و پایان را حذف می کند. در انتها این داده ها به گذرگاه داده در دستگاه دریافت کننده فرستاده می شوند.

همان طور که گفته شد داده ها در ارتباط UART به صورت یک بسته فرستاده می شوند. هربسته شامل یک بیت شروع، 5 تا 9 بیت داده(به UART بستگی دارد)، یک بیت توازن قابل تنظیم و یک یا دو بیت پایانی.

بیت شروع
خط انتقال اطلاعات از UART زمانی که از آن استفاده نمی شود، در حالت HIGH می گیرد. برای شروع انتقال اطلاعات این خط برای مدت یک کلاک ساعت در وضعیت LOW قرار می گیرد. زمانی که دستگاه دریافت کننده یک تغییر سطح ولتاژ از حالت HIGH به LOW را تشخیص داد، شروع به دریافت داده ها با baud rate مشخص می شود.
ساختار داده
در این قسمت داده اصلی قرار گرفته و می تواند از 5 تا 8 بیت، در صورتی که از بیت توازن استفاده شود، را شامل شود. و در صورتی که بیت تعادل به کار نرود، می تواند تا 9 بیت باشد. در اکثرا اوقات ابتدا بیت کم ارزش(LSB) فرستاده می شود.
توازن
این بیت ها معمولا توازن زوج و یا فرد در داده ها به وجود می آورند. از بیت توازن برای تشخیص وجود خطا در داده های ارسالی UART استفاده می شود. بیت های ارسالی ممکن است به دلایلی مانند: امواج الکترومغناطیسی، عدم تطابق baud rate و یا فاصله طولانی بین دستگاه ها به وجود آید. زمانی که داده دریافت شد، تعداد یک های موجود در آن با توجه به توازن زوج و یا فرد انتخاب شده، بررسی می شود. در صورتی که بیت توازن صفر باشد(توازن زوج)، در این صورت تعداد یک ها باید زوج، و در صورتی که بیت توازن یک باشد(توازن فرد) تعداد یک ها باید فرد باشد. از این طریق وجود و یا عدم وجود خطا در داده ارسالی بررسی می شود.
بیت آخر
برای مشخص کردن داده پایانی، دستگاه فرستنده خط انتقال داده را برای مدت حداقل دو بیت از حالت LOW به حالت HIGH منتقل می کند.
پست های مرتبط
بهمن 2, 1397

اردیبهشت 18, 1397
دی 4, 1396

دیدگاهتان را بنویسید