
کنترل مکعب ال ای دی سه در سه با استفاده از رزبری پای
به نام خدا
کنترل مکعب ال ای دی سه در سه با استفاده از رزبری پای

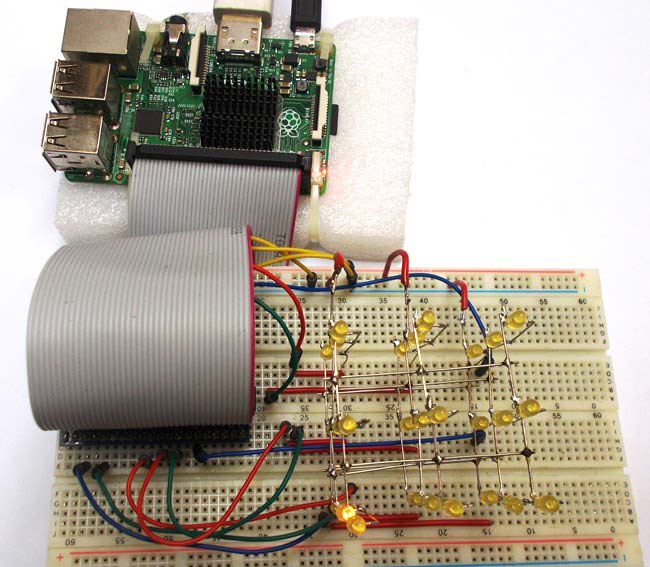
در این پروژه قصد داریم تا با استفاده از رزبری پای یک مکعب ال ای دی سه در سه در سه بسازیم که در الگو های متفاوتی روشن می شوند. تمامیه پروسه ی این پروژه توسط رزبری پای انجام می شود. در تصویر بالا شمایل تمام شده ی رزبری پای را مشاهده می کنید که از 27 ال ای دی سه در سه در سه تشکیل شده است. انواع مختلفی از مکعب ها را می توانیم بسازیم. ساده ترین آن هه سه در سه در سه می باشد. برای چهار در چهار در چهار کار تقریبا سه برابر می شود و مابه 64 ال ای دی نیاز داریم. برای شروع بهترین نوع همان سه در سه در سه می باشد.
قطعات مورد نیاز :
در اینجا از Raspberry Pi 2 Model B with Raspbian Jessie OS استفاده می کنیم.
سه عدد مقاومت 220 اهمی
27 عدد ال ای دی
هویه
ساخت مکعب سه در سه در سه ال ای دی:
در تصویر زیر مشاهده می کنید که 9 دسته پایانه ی مثبت ال ای دی ها به چه پایه هایی از رزبری پای متصل شده اند.
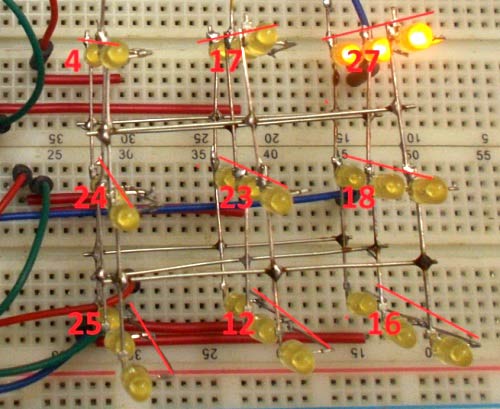
همینطور3 ردیف پایانه ی ال ای دی منفی نیز به صورت زیر به پین ها متصل هستند :
پایانه های مشترک منفی طبقه ی بالا به : 13
پایانه های مشترک منفی طبقه ی وسط به : 6
پایانه های مشترک منفی طبقه ی پایین به : 5

هنگامی که همه چیز را انجام دادید باید تصویری مانند زیر داشته باشید.

شماتیک مدار و توضیحات آن:
در تصویر زیر تصویر کاملی از اتصالات مدار را مشاهده می کنید.

دانلود کد برنامه :
[maxbutton id=”274″ url=”http://avatrobo.ir/wp-content/uploads/2018/12/3X3X3-LED-Cube-with-Raspberry-Pi-and-Python-Program.txt” ]
#working
import RPi.GPIO as IO #calling for header file which helps in using GPIO’s of PI
import time #calling for time to provide delays in program
IO.setwarnings(False) #do not show any warnings
x=1
y=1
z=0
IO.setmode (IO.BCM)
IO.setup(4,IO.OUT) #initialize GPIO4 as an output
IO.setup(17,IO.OUT) #initialize GPIO17 as an output
IO.setup(27,IO.OUT) #initialize GPIO27 as an output
IO.setup(24,IO.OUT)
IO.setup(23,IO.OUT)
IO.setup(18,IO.OUT)
IO.setup(25,IO.OUT)
IO.setup(12,IO.OUT)
IO.setup(16,IO.OUT)
IO.setup(5,IO.OUT)
IO.setup(6,IO.OUT)
IO.setup(13,IO.OUT)
columns = [4,17,27,24,23,18,25,12,16] #GPIO pins of columns in order
rows =[5,6,13] #GPIO pins of rows in order
random = [4,24,25,17,23,12,27,18,16] #GPIO pins of columns in random
for z in range (3):
IO.output(rows[z],1) #pulling up the rows
for z in range (9):
IO.output(columns[z],0) #pulling down the columns
while 1:
for y in range (3): #execute the loop 3 times incrementing y value from zero to three
IO.output(rows[y],0) #pull down the rows pointed by 'y'
for x in range (9): #execute the loop 9 times incrementing x value from zero to eight
IO.output(columns[x],1) #pull up the columns pointed by 'x'
time.sleep(0.1) #sleep for 100ms
IO.output(columns[x],0) #pull down the columns after 100ms
IO.output(rows[y],1) #pull up the row after 100ms
for y in range (3):
IO.output(rows[2-y],0)
for x in range (9):
IO.output(columns[8-x],1)
time.sleep(0.1)
IO.output(columns[8-x],0)
IO.output(rows[2-y],1)
for y in range (3):
IO.output(rows[y],0)
for x in range (9):
IO.output(columns[x],1)
time.sleep(0.1)
IO.output(columns[x],0)
for y in range (3):
IO.output(rows[y],1)
for y in range (3):
IO.output(rows[2-y],0)
for x in range (9):
IO.output(columns[8-x],1)
time.sleep(0.1)
IO.output(columns[8-x],0)
for y in range (3):
IO.output(rows[2-y],1)
for y in range (3):
IO.output(rows[y],0)
for x in range (9):
IO.output(random[x],1)
time.sleep(0.1)
IO.output(random[x],0)
IO.output(rows[y],1)
for y in range (3):
IO.output(rows[2-y],0)
for x in range (9):
IO.output(random[8-x],1)
time.sleep(0.1)
IO.output(random[8-x],0)
IO.output(rows[2-y],1)
پست های مرتبط

اردیبهشت 9, 1398

اسفند 5, 1397



بهمن 2, 1397


دیدگاهتان را بنویسید