
انکودر چرخشی با میکروکنترلر ATmega8
به نام خدا
انکودر چرخشی با میکروکنترلر ATmega8

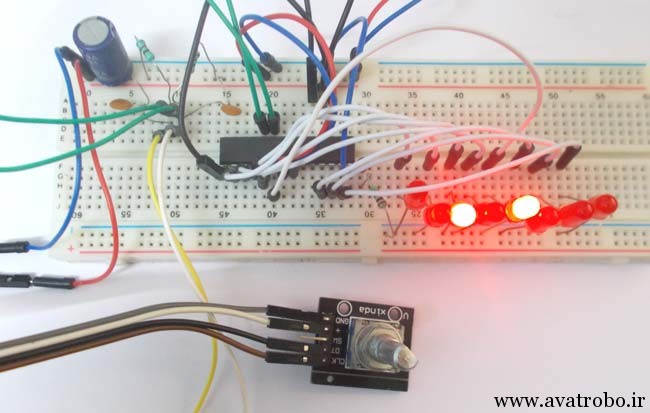
در این پروژه می خواهیم یک انکدور چرخشی توسط یک ولوم با میکروکنترلر ATmega8 درست کنیم . کاربرد این انکودر برای اندازه گیری میزان چرخش یک موتور و یا زاویه انحراف آن می باشد . ماژول انکودر چرخشی ، عموما دارای سه پایه به علاوه دو پایه برای اتصال به زمین و 5 ولت است در زیر تصویر یک ماژول انکور چرخشی را می بینید .

تشریح پایه های ماژول :
- زمین
- 5 ولت
- خروجی سیگنال پین A
- خروجی سیگنال پین B
- پین کلاک یا پین مشترک
انکودر پالسی را برای مشخص کردن موقعیت شفت انکودر ایجاد می کند.

همان طور که در جدول بالا می بینید ، در حالت گردش ساعت گرد شفت انکودر ، لبه پایین رونده ابتدا برای خروجی A اتفاق می افتد و سپس برای خروجی B . در حالت پاد ساعت گرد ، لبه پایین رونده ابتدا برای خروجی B رخ می دهد و سپس برای خروجی A . از این طریق می توانیم جهت چرخش انکودر را بفهمیم .
این لبه پایین رونده برای 360 تقسیم بر 20 یعنی 18 میلی ثانیه پالس را در حالت low نگه می دارد ( البته این برای یک انکودر با 20 موقعیت است ، مشخص است که برای انکودر های مختلف این مقدار فرق خواهد کرد) . که از این طریق موقعیت انکودر مشخص می شود .
قطعات مورد نیاز پروژه :
- میکروکنترلر ATmega8
- مقاومت 220 اهم
- LED
- مقاومت 1 کیلو اهم
- خازن 100 نانو فاراد
برنامه توسط کامپایلر اتمل استودیو نوشته شده است .

وجود خازن برای خواندن موقعیت درست شفت انکودر الزامی است .
زمانی انکودر در حال حرکت است ، اختلاف زمانی بین دو خروجی A و B وجود دارد که میکروکنترلر ATmega8 آن را تشخیص می دهد .
برای دانلود کد های برنامه بر روی لینک زیر کلیک کنید .
[maxbutton id=”90″ url=”http://avatrobo.ir/wp-content/uploads/2015/11/rotary-encoder.zip” text=”دانلود فایل” ]
برای دیدن فیلم این پروژه در لینک زیر کلیک کنید .
[maxbutton id=”89″ url=”http://avatrobo.ir/wp-content/uploads/2015/11/Rotary-Encoder-Interfacing-with-ATmega8-Microcontroller_new.mp4″ text=”دانلود فیلم” ]
پست های مرتبط

اردیبهشت 9, 1398

اسفند 5, 1397



بهمن 2, 1397

2 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.

با عرض سلام و احترام.
میشه لطفا نقشه مدار رو بزارید.
با تشکر
سلام
ممنون
شماتیک مدار که هست!!!