
پروژه ی راه اندازی ماژول زمان حقیقی DS1307 با استفاده از رزبری پای
به نام خدا
پروژه ی راه اندازی ماژول زمان حقیقی DS1307 با استفاده از رزبری پای

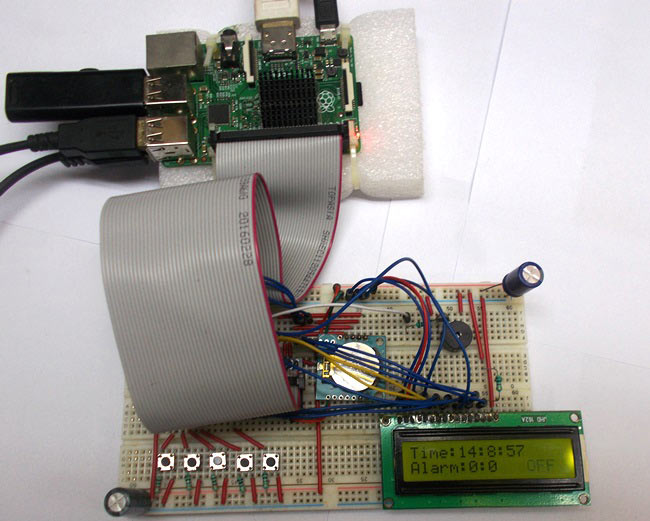
این بخش قصد راه اندازی ماژول زمان حقیقی DS1307 با استفاده از رزبری پای برای ساخت یک زنگ هشدار را داریم.اگرچه رزبری پای خود دارای یک ساعت داخلی می باشد اما بدون اتصال به اینترنت ،پس از هر ریبوت ساعت داخلی ریست می شود.بنابراین برای داشتن زمان دقیق بایستی یک ماژول RTC DS1307 را با رزبری پای راه اندازی کنیم.در این ساعت دیجیتال رزبری پای ، برای نمایش ساعت و وضعیت زنگ هشدار از یک ال سی دی 2*16 استفاده کرده ایم.
هر بار که برنامه در پای اجرا می شود می توان اتصال مانیتور را قطع و زنگ هشدار را با استفاده از ال سی دی و 5 دکمه تنظیم نمود.
هر یک از 17 پین GPIO می توانند جریان 15mA بکشند یا تحویل بدهند، فلذا پیش از تغذیه رزبری پای هر یک از پین ها را دوبار چک نمایید.
اجزای موردنیاز:
در اینجا از رزبری پای 2 مدل B به همراه سیستم عامل رزبین جسی استفاده شده است.
رزبری پای با سیستم عامل از پیش نصب شده
ماژول RTC DS1307 با باتری
منبع تغذیه
6 عدد مقاومت 1k
5 عدد کلید
2 عدد خازن 1000 میکروفاراد
ال سی دی 2*16
ترانزیستور 2N2222
زنگ اخبار
دیاگرام مداری و اتصالات :

اتصالات میان رزبری پای و ال سی دی در جدول زیر نمایش داده شده اند:

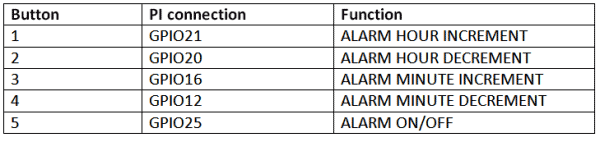
همچنین اتصالات میان رزبری پای و 5 کلید با توجه به عملکرد هر یک از کلیدها در جدول زیر نمایش داده شده اند:
تشریح عملکرد و برنامه:
ماژول RTC دارای یک کلید برای بکاپ است و کمک می کند ما همواره زمان دقیق را در اختیار داشته باشیم.
اکنون برای دریافت زمان دقیق از ماژول RTC یک برنامه پایتون می نویسیم.زمان روی ال سی دی نمایش داده خواهد شد.سپس در برنامه نوشته شده ویژگی های زنگ هشدار را پیاده می کنیم.زمان زنگ هشدار به همراه وضعیت خاموش/روشن آن در خط دوم ال سی دی نمایش داده خواهد شد.زنگ هشدار بکمک 5 کلید متصل شده به رزبری پای تنظیم خواهد شد.2 کلید برای کم و زیاد کردن ساعت،2 کلید برای کم و زیاد کردن دقیقه و 1 کلید نیز برای خاموش و روشن کردن زنگ هشدار تعریف می شوند.
برنامه پایتون زمان حقیقی را با زمان زنگ هشدار مدام مقایسه می کند و هنگام تطبیق دو زمان ، پای زنگ اخبار را که از طریق ترانزیستور 2N2222 به پین GPIO 22 متصل است به صدا در می آورد.
دانلود کد برنامه ی پروژه ی راه اندازی ماژول زمان حقیقی DS1307 با استفاده از رزبری پای :
[maxbutton id=”263″ url=”http://avatrobo.ir/wp-content/uploads/2018/08/Raspberry-Pi-Alarm-Clock-using-RTC-Module-DS1307.txt” ]
برنامه کامل به زبان پایتون را به همراه توضیحات می توانید در زیر مشاهده نمایید:
import RPi.GPIO as IO #calling for header file which helps in using GPIO’s of PI
import time #we are calling for time to provide delays in program
import datetime #we are calling for DATE
import SDL_DS1307 #calling for special functions which helps us interface RTC module
h=0 #integers for storing values
m=0
alarm=0
string_of_characters = 0
ds1307 = SDL_DS1307.SDL_DS1307(1, 0x68) #entering I2c address, which we recorded previously
ds1307.write_now()
IO.setwarnings(False) #do not show any warnings
IO.setmode (IO.BCM) #programming the GPIO by BCM pin numbers. (like PIN29 as'GPIO5')
#initialize GPIO17,27,24,23,18,26,5,6,13,19 as an output
IO.setup(17,IO.OUT)
IO.setup(27,IO.OUT)
IO.setup(24,IO.OUT)
IO.setup(23,IO.OUT)
IO.setup(18,IO.OUT)
IO.setup(26,IO.OUT)
IO.setup(5,IO.OUT)
IO.setup(6,IO.OUT)
IO.setup(13,IO.OUT)
IO.setup(19,IO.OUT)
IO.setup(21,IO.IN) #initialize GPIO21 as an input.
IO.setup(20,IO.IN) #initialize GPIO20 as an input.
IO.setup(16,IO.IN)
IO.setup(12,IO.IN)
IO.setup(25,IO.IN)
IO.setup(22,IO.OUT) #initialize GPIO22 as an output.
def send_a_command (command): #steps for sending a command to 16*2LCD
pin=command
PORT(pin);
IO.output(17,0)
IO.output(27,1)
time.sleep(0.001)
IO.output(27,0)
pin=0
PORT(pin);
def send_a_character (character):#steps for sending a character to 16*2 LCD
pin=character
PORT(pin);
IO.output(17,1)
IO.output(27,1)
time.sleep(0.001)
IO.output(27,0)
pin=0
PORT(pin);
def PORT(pin): #assigning level for PI GPIO for sending data to LCD through D0-D7
if(pin&0x01 == 0x01):
IO.output(24,1)
else:
IO.output(24,0)
if(pin&0x02 == 0x02):
IO.output(23,1)
else:
IO.output(23,0)
if(pin&0x04 == 0x04):
IO.output(18,1)
else:
IO.output(18,0)
if(pin&0x08 == 0x08):
IO.output(26,1)
else:
IO.output(26,0)
if(pin&0x10 == 0x10):
IO.output(5,1)
else:
IO.output(5,0)
if(pin&0x20 == 0x20):
IO.output(6,1)
else:
IO.output(6,0)
if(pin&0x40 == 0x40):
IO.output(13,1)
else:
IO.output(13,0)
if(pin&0x80 == 0x80):
IO.output(19,1)
else:
IO.output(19,0)
def send_a_string(string_of_characters): #steps for sending string of characters to LCD
string_of_characters = string_of_characters.ljust(16," ")
for i in range(16):
send_a_character(ord(string_of_characters[i]))
#send characters one by one until all the strings characters are sent through data port
while 1:
send_a_command(0x38); #use two lines of LCD
send_a_command(0x0E); #screen and cursor ON
send_a_command(0x01); #clear screen
time.sleep(0.1) #sleep for 100msec
while 1:
if (IO.input(21) == 0):
if (h<23): #if button1 is pressed and hour count is less than 23 increment 'h' by one
h=h+1
if (IO.input(20) == 0):
if (h>0): #if button2 is pressed and hour count is more than 0 decrease 'h' by one
h=h-1
if (IO.input(16) == 0):
if (m<59): #if button3 is pressed and minute count is less than 59 increment 'm' by one
m=m+1
if (IO.input(12) == 0):
if (m>0): #if button4is pressed and minute count is more than 0 decrease 'm' by one
m=m-1
if (IO.input(25) == 0): #if button5 is pressed toggle Alarm ON and OFF
if (alarm==0):
alarm=1
else:
alarm=0
time.sleep(0.1)
if (alarm==1):
send_a_command(0x80 + 0x40 + 12);
send_a_string("ON"); #if alarm is set, then display "ON" at the 12th position of second line of LCD
if ((h==ds1307._read_hours())):
if ((m==ds1307._read_minutes())):
IO.output(22,1) #if alarm is set, and hour-minute settings match the RTC time, trigger the buzzer
if (alarm==0):
send_a_command(0x80 + 0x40 + 12);
send_a_string("OFF"); #if alarm is OFF, then display "OFF" at the 12th position of second line of LCD
IO.output(22,0) #turn off the buzzer
send_a_command(0x80 + 0); #move courser to 0 position
send_a_string ("Time:%s:%s:%s" % (ds1307._read_hours(),ds1307._read_minutes(),ds1307._read_seconds()));
#display RTC hours, minutes, seconds
send_a_command(0x80 + 0x40 + 0); #move courser to second line
send_a_string ("Alarm:%s:%s" % (h,m)); #show alarm time
time.sleep(0.1) #wait for 100msec
پست های مرتبط

اردیبهشت 9, 1398

اسفند 5, 1397



بهمن 2, 1397


دیدگاهتان را بنویسید