
پروژه کنترل موتور دی سی با انکودر دوار و آردوینو به همراه کد برنامه
به نام خدا
پروژه کنترل موتور دی سی با انکودر دوار و آردوینو به همراه کد برنامه

در این پروژه کنترل موتور دی سی با انکودر دوار، آردوینو و درایور موتور L293D را یاد خواهیم گرفت.
در این جا از انکودر زیر استفاده شده است:
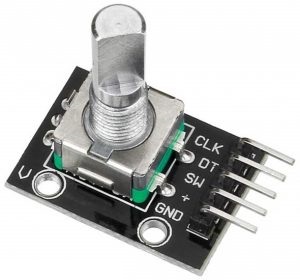
انکدور 5 پایه به نام های (GND, +5V , SW (push button), DT (pin B) , CLK (pin A دارد.
در کنار انکودر یک میکروسوئیچ و سه مقاومت پول آپ 10 کیلو اهم در پایه های SW ، DT و CLK نیاز است. با این سه مقاومت پول آپ ، این پایه ها در حالت 1 منطقی قرار می گیرند. این انکودر در پایه های (A (CLK و (B(DT سیگنال های مربعی با اختلاف فاز 90 درجه از یکدیگر (مانند شکل زیر) تولید می کند:
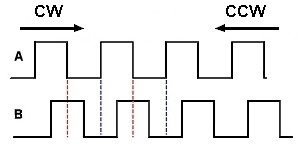
از آنجا که در حالت عادی پایه های A و B ، یک منطقی هستند ما باید لبه پایین رونده(لحظه تغییر حالت از یک به صفر ) را تشخیص دهیم. در اینجا پایه A چرخش انکودر به هر سمتی و پایه B جهت این چرخش را تشخیص می دهد. اگر پایه B یک منطقی باشد یعنی چرخش در جهت عقربه های ساعت و اگر پایه B صفر منطقی باشد یعنی چرخش در جهت خلاف عقربه های ساعت است.
قطعات مورد نیاز کنترل موتور دی سی با انکودر دوار و آردوینو :
- برد آردوینو
- انکودر دوار
- موتور دی سی
- درایور موتور L293D
- برد بورد
- منبع ولتاژ 12 ولت
- سیم برد بورد
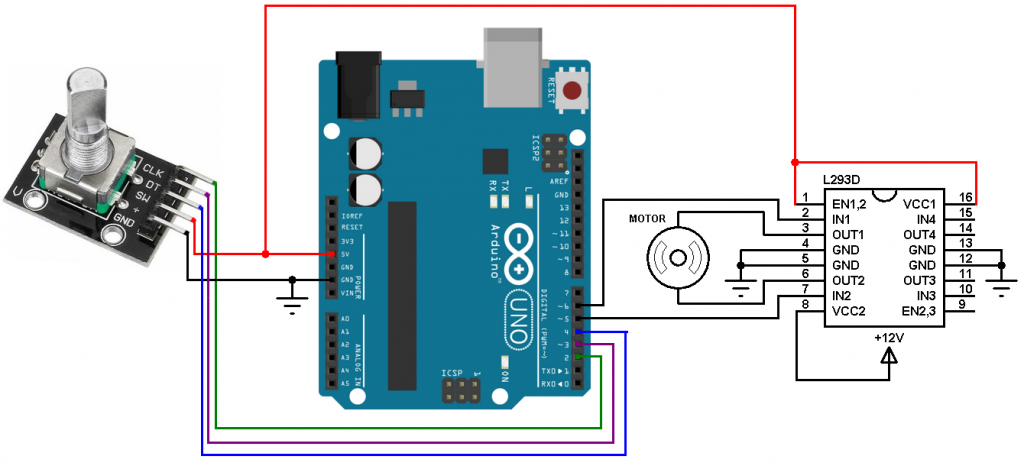
شماتیک مدار:
شماتیک مدار به صورت زیر است.
(همه زمین های مدار به یکدیگر متصل شده اند ، ترمینال منفی منبع را هم به زمین وصل کنید)
درایور L293D قابلیت راه اندازی دو موتور را در هر دو جهت دارد. با دو سیگنال PWM که آردوینو تولید می کند به راحتی می توانیم سرعت و جهت چرخش موتور را کنترل کنیم.(PWM: Pulse Width Modulation)
درایور L293D با دو منبع جدا گانه تغذیه می شود. اولی VCC1) + 5) ولت است که از برد آردوینو می آید و دومی(VCC2) ولتاژ نامی موتور است و با + 12 ولت تغذیه می شود. پایه های IN1 و IN2 برای کنترل موتور می باشد که در زیر حالت هایش را می بینیم:
| IN1 | IN2 | Function |
| L | H | Direction 1 |
| H | L | Direction 2 |
| L | L | Fast motor stop |
| H | H | Fast motor stop |
پین های 5 و 6 آردوینو برای تولید سیگنال PWM می باشند. در هرلحظه فقط یکی از پایه های PWM می تواند فعال باشد. این سبب می شود که علاوه بر سرعت ، جهت موتور نیز بوسیله چرخه کار PWM در هر لحظه قابل کنترل باشد.جهت حرکت موتور وابسته به پایه فعال PWM است(وقتی یکی از PWM ها یک باشد دیگری صفر می باشد)
کد های آردوینو:
دانلود کد برنامه کنترل موتور دی سی با انکودر دوار و آردوینو :
[maxbutton id=”197″ url=”http://avatrobo.ir/wp-content/uploads/2018/03/سشس.txt” ]
// DC motor speed and direction control with Arduino and rotary encoder
#define pin_B 3 // Rotary encoder pin B (DT) is connected to Arduino pin 3
#define button 4 // Rotary encoder push-button pin (SW) is connected to Arduino pin 4
#define pwm1 5
#define pwm2 6
boolean motor_dir = 0;
int motor_speed = 0;
void setup() {
pinMode(pwm1, OUTPUT);
pinMode(pwm2, OUTPUT);
attachInterrupt(0, encoder_read, FALLING); // Enable external interrupt (INT0)
}
void encoder_read() {
if(digitalRead(pin_B)) {
motor_speed++;
if(motor_speed > 255)
motor_speed = 255;
}
else
if(motor_speed > 0)
motor_speed--;
if(motor_dir)
analogWrite(pwm1, motor_speed);
else
analogWrite(pwm2, motor_speed);
}
void loop() {
if(!digitalRead(button)) { // If direction button is pressed
while(!digitalRead(button)); // Wait for direction button release
motor_dir = !motor_dir; // Toggle direction variable
if(motor_dir) {
digitalWrite(pwm2, 0);
analogWrite(pwm1, motor_speed);
}
else {
digitalWrite(pwm1, 0);
analogWrite(pwm2, motor_speed);
}
}
}
پست های مرتبط

اردیبهشت 9, 1398

اسفند 5, 1397



بهمن 2, 1397


دیدگاهتان را بنویسید