
ساخت ربات مسیریاب با آردوینو
به نام خدا
ساخت ربات مسیریاب با آردوینو
در این پروژه می خواهیم یک ربات مسیریاب با استفاده از برد آردوینو بسازیم .
ربات مسیریاب یا همان تعقیب خط ، یک ربات است که برای تعقیب کردن یک خط طراحی و ساخته می شود . عموما این خط ، یک خط سیاه در زمینه سفید و یا یک خط سفید در زمینه سیاه است .

مفاهیم ربات مسیریاب :
وقتی نور به روی یک زمینه سفید می افتد بیشتر آن نور از آن سطح بازتابیده می شود و نور به یک زمینه سیاه تابیده می شود بیشتر آن نور جذب سطح می شود .


در ربات مسیریاب ، یک فرستنده مادون قرمز ( فتو دیود ) و یک گیرنده مادون قرمز (فتو ترانزیستور ) وجود دارد . فرستنده مادون قرمز ، نور مادون قرمز را به سطح می تاباند ؛ در صورت سفید بودن سطح ، بیشتر نور بازتابیده شده و به گیرنده مادون قرمز می رسد و ولتاژ خروجی گیرنده high شده و ولتاژ 1 منطقی به پین آردوینو می رسد . در صورت سیاه بودن سطح ، نور کمتری بازتابیده می شود و گیرنده مادون قرمز نور کمتری دریافت می کند و ولتاژ خروجی گیرنده low شده و ولتاز 0 منطقی به پین آردوینو می رسد .
توضیحات مدار :
کل این ربات را می توان به 3 بخش سنسور ، کنترل و درایور تقسیم بندی کرد .
سنسور :
این بخش شامل یک فرستنده ( دیود مادون قرمز ) ، یک گیرنده ، مقایسه گر ها ( op-amp ) و پتانسومتر می باشد .
ما توسط پتانسیومتر ، ولتاژ مرجع مقایسه گر را تعیین می کنیم . این بدان معناست که اگر ولتاژ خروجی سنسور که به آپ امپ ( مقایسه گر ) می رسد کمتر از ولتاژ مرجع باشد ، خروجی آپ امپ 0 منطقی می شود و به پین آردوینو می رسد و اگر ولتاژ خروجی سنسور که به ورودی آپ امپ وصل می شود ، ببشتر از ولتاژ مرجع باشد ، خروجی آپ امپ 1 منطقی شده و به پین آردوینو می رسد . آی سی آپ امپ ما LM358 می باشد که شامل دو مقایسه گر است .
کنترل :
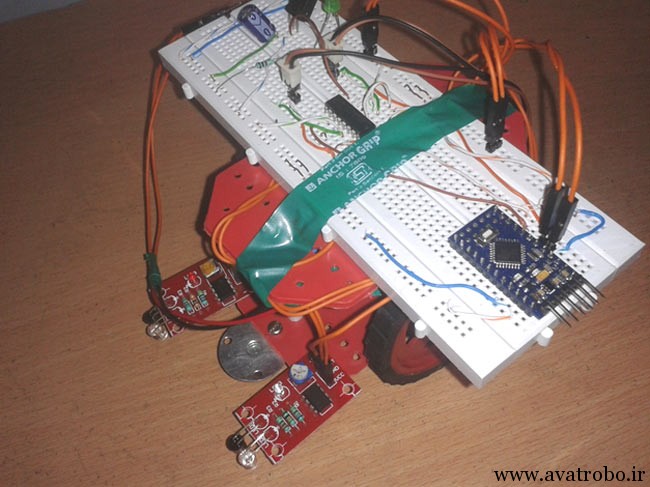
بخش کنترل این ربات از یک برد آردوینو مدل Pro mini تشکیل شده است که خروجی های آپ امپ به پین های 2 و 3 این برد وصل شده است .
درایو :
بخش درایو ربات مسیریاب شامل موتور ها و مدار های درایور آن ها می باشد . مدار درایور موتور ها به منظور ارائه ولتاژ و جریان مناسب به موتور طراحی می شود . برد آردوینو دستورات کنترلی را به این مدار اعمال می کند .
نحوه عملکرد ربات مسیریاب با آردوینو :
بلوک دیاگرام :

حالت ایست :

حالت گردش به چپ :

حالت گردش به راست :

حالت حرکت مستقیم رو به جلو :

شماتیک مداری :

قطعات اصلی مورد نیاز :
برد آردوینو مدل Pro mini

آی سی L293 که نقش درایور موتور را بر عهده دارد

ماژول سنسور مادون قرمز

تغذیه
یک باتری 9 ولت برای موتور ها و یک رگولاتور 7805 که ورودی آن همان طور که در مدار می بینید به باتری 9 ولت و خروجی آن برای تغذیه برد آردوینو استفاده می شود .
برای دانلود کد های برنامه بر روی لینک زیر کلیک کنید .
[maxbutton id=”67″ url=”http://avatrobo.ir/wp-content/uploads/2015/11/Line-Follower-Robot-using-Arduino.txt” text=”دانلود فایل” ]
برای دیدن فیلم این ربات مسیریاب در لینک زیر کلیک کنید .
[maxbutton id=”68″ url=”http://avatrobo.ir/wp-content/uploads/2015/11/Line-Follower-Robot-using-Arduino_new.mp4″ text=”دانلود فایل” ]
پست های مرتبط

اردیبهشت 9, 1398

اسفند 5, 1397


16 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.

سلام
عالی بود
خیلی ممنون
سلام
خواهش میکنم…ممنون…. 🙂
سلام خسته نباشید
من همه چیزو همینجوری بستم اما جواب نمیداد…اصلا حرکتی نمیکرد ربات.سنسورم ک کاری نمیکرد.اصلا هیچ عملی انجام نمیداد
سلام
این مدار تست شده
سنسوراتون رو چک کردید ببینید سیگنال دریافت میکنه؟
سلام
میشه بجای آی سی LM358از آی سی LM324 استفاده کرد؟
سلام.
بله میشه
سلام بله تست کردم مشکلی نداشت…
میشه بدونم نقش اون دو تا پتانسیومترها چیه؟؟اگر نباشه فرقی ایجاد میشه تو مدار؟؟؟
باتری 9 ولت جواب میده هم موتور و هم برد ؟
من دوباره تست کردم و یکم مقادیر عوض کردم الان بالاخره روشن میشه اما فقط به راست میچرخه دور خودش. 😐
راسی فرقی نداره سنسورا انالوگ وصل بشه یا دیجیتال؟چون من بیشتر جاها ک با سنسور دیدم پروژه ها دیگه رو ب انالوگ وصل کردن..اصلا چ فرقی داره؟
نقش اون دو تا پتانسیومتر تعیین ولتاژ مرجع آپ امپ هستش یعنی اگه مقدار سنسور ازین مقدار کمتر بشه خرجی آپ امپ صفر منطقی و اگر خروجی این سنسور بیشتر از مقدار این ولتاژ باشه خروجی آپ امپ یک منطقی خواهد بود .
سنسورایی که واسه مسیر یاب میذارن همشون خروجی آنالوگ دارن ، آپ امپ یا بافر این خروجی آنلوگ رو صفر و یک میکنه و میده به میکروکنترلر .
سلام خسته نباشید
ببخشید اگر آردوینو توی مدار نباشه یا باشه ولی برنامه نویسی نشده باشه، با وصل ۹ولت موتور ها باید روشن بشن یا خیر؟؟
یعنی باید شروع کنن ب چرخیدن یا خیر؟
سلام
نه نباید شروع کنن به چرخیدن
با سلام
قیمت این پک چقدره ؟؟
می تونید پک ربات مسیریاب رو از قسمت فروشگاه- بسته های آموزشی رو ببینید و خریداری کنید. سه مدل مختلف هست….
سلام ببخشید منفی باطری به کجا وصل میشود؟
سلام
به زمین مدار دیگه… به پایه GND
سلام. ببخشید من تو عکس این ربات یک خازن می بینم ولی تو شماتیکش نیست . می شه راهنمایی کنید؟ با تشکر
سلام
اون خازن ضروری نیست. ولی اگه بخواید بذارید دو تا خازن یک میکروفاراد به بالا(مثلا اگه 10 میکرو هم بذارید مشکلی پیش نمیاد) با ولتاژ بیشتر از ولتاژ ورودی رگولاتور بذارید. یکی بین پایه 1و 2 رگولاتور و یکی هم بین پایه 2 و 3 رگولاتور. به مثبت و منفی خازن توجه کنید.