

آموزش پروژه ربات دو چرخ خود تعادلی
در این پروژه می خواهیم ساخت یک ربات دو چرخ که خودش تعادل خود را حفظ می کند ( شبیه به پاندول معکوس ) را به شما آموزش دهیم .
29
340,000
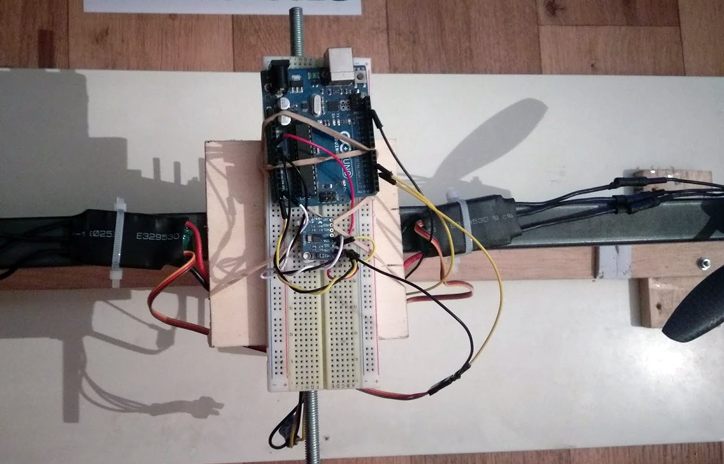
آموزش پروژه کنترل PID با آردوینو و دو موتور براشلس
امروز در این پروژه از کنترل کننده PID برای کنترل کردن دو موتور براشلس استفاده می کنیم . با توسعه این سیستم می توان سیستم ربات های پرنده عمود پرواز را طراحی کرد . تعادل این موتور ها را و محاسبه زاویه توسط سنسور MPU6050 انجام می شود .
45
174,000
